- tel:+86-13222111178
- email:info@ntjugao.com






Como escolher um posicionador para um robô de soldagem
Como escolher um posicionador para um robô de soldagem

Os posicionadores são geralmente classificados de acordo com o número de motores de acionamento: posicionadores de um eixo, de dois eixos, de três eixos e posicionadores compostos. Antes e durante as operações de soldagem, o posicionador usa dispositivos de fixação para prender e posicionar a peça a ser soldada. As diferentes exigências da peça determinam a capacidade de carga e o modo de movimento do posicionador. Como um componente importante de linhas de produção de soldagem robotizada e células flexíveis de processamento por soldagem, a função do posicionador é girar (transladar) a peça para a posição ideal de soldagem.

1. Posicionador de um eixo
Os posicionadores de um eixo são geralmente classificados em tipo L e tipo C, de acordo com sua forma estrutural. Um posicionador tipo L inclui: uma cabeça motriz, uma contraponta e uma estrutura mecânica. A cabeça motriz é geralmente acionada por um eixo externo do robô de soldagem, permitindo movimento coordenado com o robô de soldagem. A contraponta é não motorizada e utiliza um sistema seguidor. Os posicionadores tipo L são usados principalmente para soldagem de peças rotativas.
2. Posicionador de dois eixos
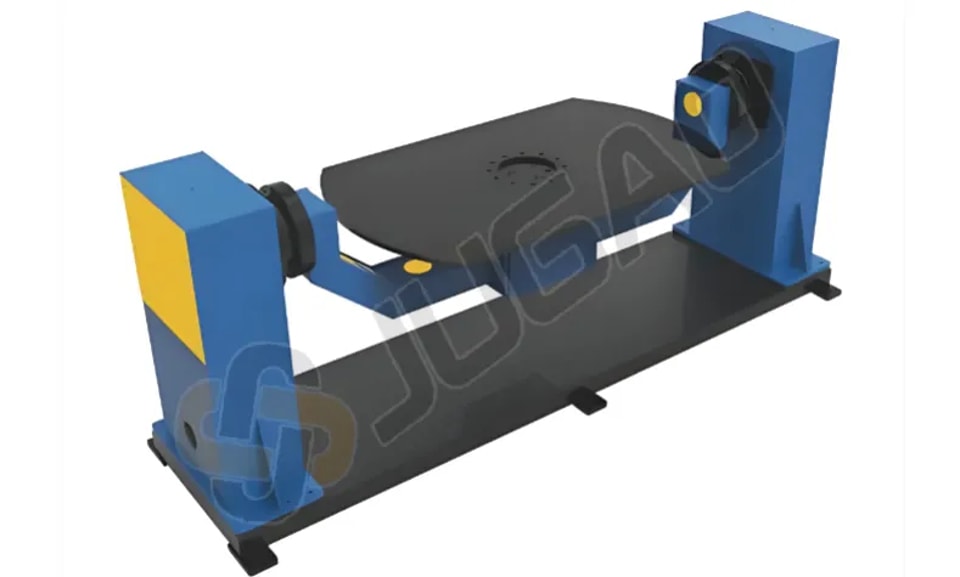
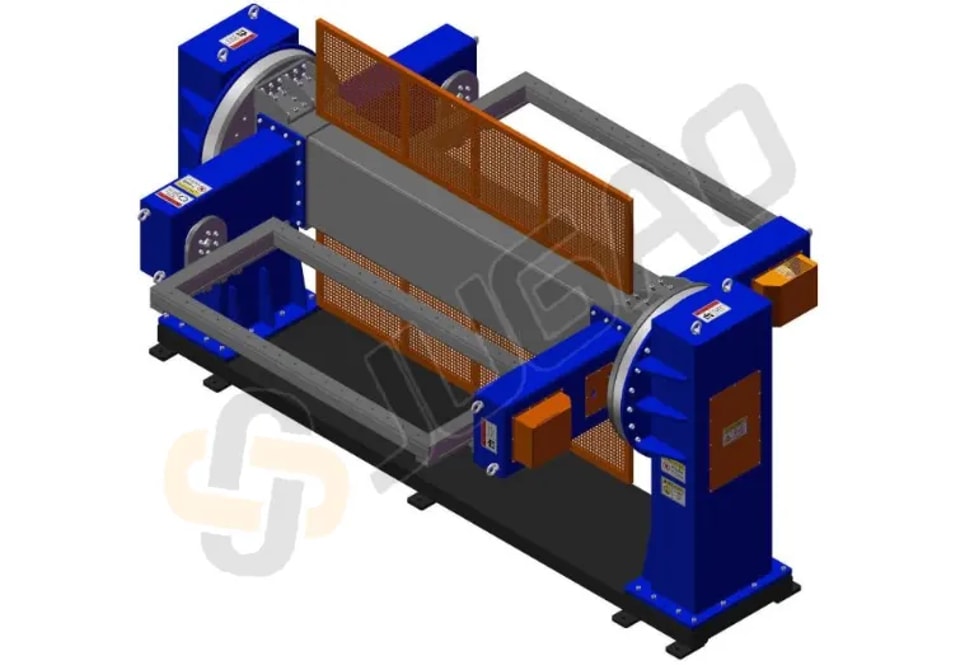
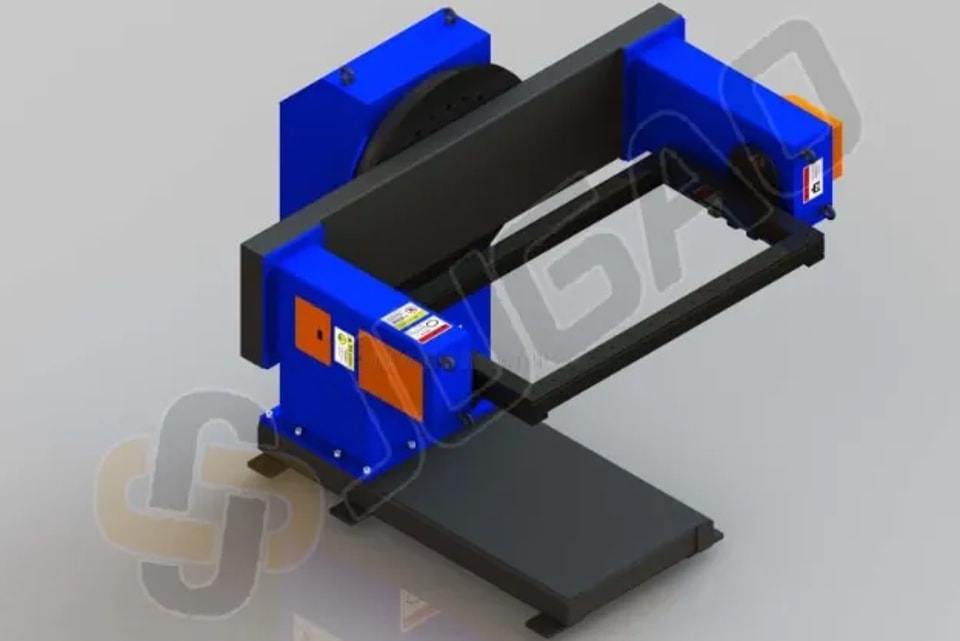
Os posicionadores de dois eixos, principalmente do tipo A, são compostos basicamente por um eixo rotativo, um eixo basculante e uma estrutura mecânica. Em geral, são acionados por eixos externos do robô de soldagem para obter movimento coordenado. Teoricamente, qualquer cordão de solda pode ser posicionado na horizontal ou na posição de soldagem em forma de barco. Os posicionadores do tipo A são normalmente usados para soldagem de peças multifacetadas (com cordões distribuídos em várias faces).
3. Posicionador de três eixos
Os posicionadores de três eixos são geralmente classificados em tipo K e tipo R, com base no formato de seus eixos rotativos.
Os posicionadores do tipo K incluem um eixo principal de rotação vertical e duas cabeças rotativas adicionais (equivalentes a um posicionador do tipo L). Em geral, são acionados por eixos externos do robô de soldagem, permitindo movimento coordenado com o robô. Os posicionadores do tipo K são usados principalmente para soldagem de peças rotativas. Uma característica importante dos posicionadores do tipo K é que o movimento de posicionamento ocupa principalmente espaço vertical, economizando espaço horizontal.
Os posicionadores do tipo R incluem um eixo principal de rotação horizontal e duas cabeças rotativas adicionais (equivalentes a um posicionador do tipo L). Em geral, são acionados por eixos externos do robô de soldagem, permitindo movimento coordenado com o robô. Os posicionadores do tipo R são usados principalmente para soldagem de peças rotativas. A característica dos posicionadores do tipo R é que seu movimento ocupa principalmente espaço horizontal, economizando espaço vertical.
4. Posicionadores compostos
Os posicionadores compostos são combinações dos diversos tipos de posicionadores mencionados acima. Aqui, apresentamos principalmente os tipos B e D.
Um posicionador do tipo B é composto por dois posicionadores do tipo A e um posicionador do tipo C. Cada posicionador do tipo A atende a uma estação, e o posicionador do tipo C é usado para a troca de estação. Um posicionador do tipo D é composto por dois posicionadores de dois eixos e um posicionador do tipo C. Cada posicionador de dois eixos atende a uma estação, e o posicionador do tipo C é usado para a troca de estação.
O núcleo da escolha de um posicionador para um robô de soldagem é selecionar um “eixo externo” que possa “trabalhar em perfeita sintonia” com o robô. Na prática, também é necessário ajustar e otimizar os parâmetros de desempenho do equipamento de acordo com os requisitos específicos da tarefa de soldagem para obter melhores resultados. Em resumo, somente com a compreensão completa e o uso racional dos parâmetros de desempenho do posicionador de soldagem é possível aproveitar ao máximo as vantagens do equipamento, melhorando a eficiência e a qualidade da produção de soldagem.
