- tel:+86-13222111178
- email:info@ntjugao.com






Opção de Encosto Traseiro
Opção de Encosto Traseiro


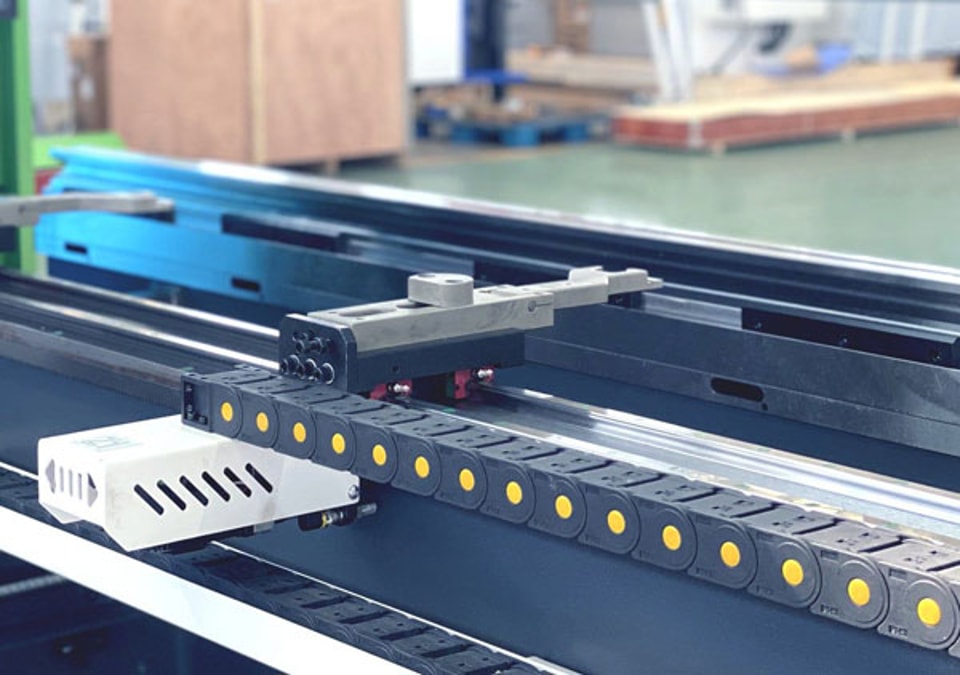
Calibrador Traseiro CNC de 2 Eixos para Prensa Dobradeira com Eixos X, R
1. Fusos de esferas e guia linear nos eixos X, R
2. Velocidade do eixo X de 500 mm/s.
3. Eixos Z1, Z2 manuais com guia linear HIWIN
4. Precisão mecânica de ± 0,03 mm.
5. Dedo com batente duplo e ajuste micrométrico.
Calibrador Traseiro CNC de 4 Eixos para Prensa Dobradeira com Eixos X, R, Z1, Z2
1. Fusos de esferas e guia linear nos eixos X, R
2. Correias de precisão e cremalheira YYC nos eixos Z1-Z2.
3. Dedo com batente duplo e ajuste micrométrico.
4. Precisão mecânica de ± 0,03 mm.
5. Velocidade dos eixos Z1-Z2 de 1000 mm/s.
6. Velocidade do eixo X de 500 mm/s.

Calibrador Traseiro CNC de 4 Eixos para Prensa Dobradeira com Eixos X, R, Z1, Z2
1. Fusos de esferas e guia linear nos eixos X, R
2. Correias de precisão e cremalheira YYC nos eixos Z1-Z2.
3. Dedo com batente duplo e ajuste micrométrico.
4. Precisão mecânica de ± 0,03 mm.
5. Velocidade dos eixos Z1-Z2 de 1000 mm/s.
6. Velocidade do eixo X de 500 mm/s.
7. Sistema de suportes finos SPA nos dedos.
8. Capacidade de carga – 30 kg por suporte.

Calibrador Traseiro CNC de 5 Eixos para Prensa Dobradeira com Eixos X, R, Z1, Z2, Delta X2
1. Fusos de esferas e guia linear nos eixos X, R
2. Correias de precisão e cremalheira YYC nos eixos Z1-Z2.
3. Dedo com batente duplo e ajuste micrométrico.
4. Precisão mecânica de ± 0,03 mm.
5. Velocidade dos eixos Z1-Z2 de 1000 mm/s.
6. Velocidade do eixo X de 500 mm/s.
7. Velocidade do eixo Delta X de 500 mm/s.

Calibrador Traseiro CNC de 6 Eixos para Prensa Dobradeira com Eixos X1, X2, R1, R2, Z1, Z2
1. Fusos de esferas e guia linear nos eixos X, R
2. Guia linear de precisão e cremalheira YYC nos eixos Z1-Z2.
3. Dedo com batente duplo e ajuste micrométrico.
4. Precisão mecânica de ± 0,03 mm.
5. Velocidade dos eixos R1-R2 de 500 mm/s
6. Velocidade dos eixos X1-X2: 600 mm/s (1000 mm/s opcional)
7. Velocidade dos eixos Z1-Z2: 1100 mm/s.
